
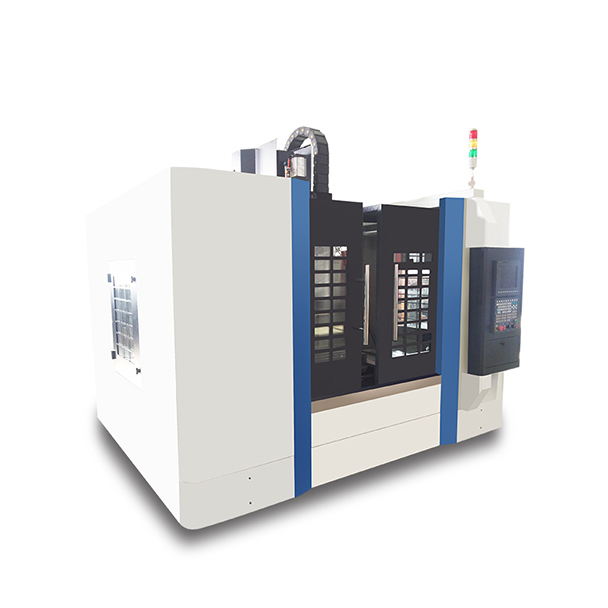


vmc1060 tvornički metalni 3-osni vertikalni CNC centar za glodanje
Prednost
1. Dodatni CNC okretni tanjur može formirati obradu koordinatnog povezivanja s četiri i pet osi.
2. Dodatni automatski uređaj za uklanjanje strugotine, sa strukturom kreveta kako bi se osigurala unutarnja čistoća;izborno hlađenje uljem vretena, itd.
3. Odljevak prolazi dva tretmana starenja kako bi se uklonio zaostali stres u materijalu.
4. Vodilice u smjeru X, Y, Z mogu odabrati tajvanske linearne kuglične vodilice za teške uvjete rada, koje imaju karakteristike velike brzine, velike krutosti i tako dalje.

Specifikacija
| Artikal | VMC1060 | ||||
| Veličina radnog stola (dužina × širina) mm | 1300×600 | ||||
| T utor (mm) | 5-18×100 | ||||
| Maksimalna težina utovara na radni stol (KG) | 650 | ||||
| Put osi X (mm) | 1000 | ||||
| Put osi Y (mm) | 600 | ||||
| Put osi Z (mm) | 600 | ||||
| Udaljenost između vrha vretena i stola (mm) | 100-700 (prikaz, stručni). | ||||
| Udaljenost između središta vretena i stupa (mm) | 667 | ||||
| Konus vretena | BT40/50 | ||||
| Maks.brzina vretena (rpm) | 8000/10000/12000 | ||||
| Snaga motora vretena (Kw) | 11/15 | ||||
| Velika brzina uvlačenja: X,Y,Z os (m/min) | 16/16/16 (24/24//24 linijska vodilica) | ||||
| Velika brzina rezanja (m/min) | 10 | ||||
| Pozicijska točnost (mm) | ±0,005 | ||||
| Ponavljanje točnosti položaja (mm) | ±0,003 | ||||
| Vrsta automatske izmjene alata | Izmjenjivač alata sa 16 glava alata (opcijski automatski izmjenjivač alata s 24 ruke) | ||||
| Maks.duljina alata (mm) | 300 | ||||
| Maks.Promjer alata | Φ80 (susjedni alat)/φ150 (ne susjedni alat) | ||||
| Maks. težina alata (KG) | 8 | ||||
| Vrijeme izmjene alata (od alata do alata) sec | 7 | ||||
| Tlak zraka (Mpa) | 0.6 | ||||
| Težina stroja (KG) | 7500 | ||||
| Ukupna veličina (mm) | 3340*2800*2700 | ||||
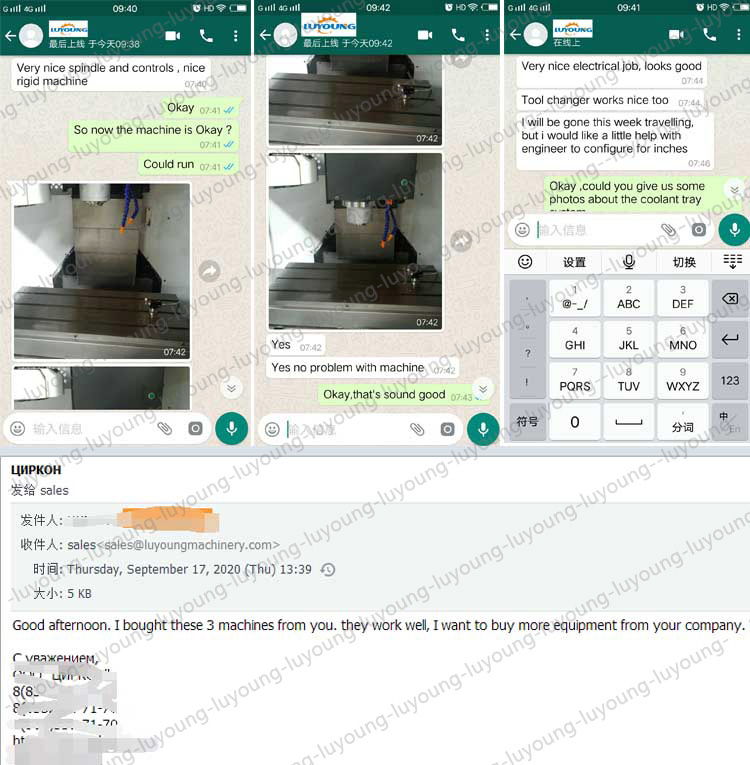
Zašto izabrati nas
Dobivamo mnogo dobrih povratnih informacija od kupaca, na primjer:
Vrlo lijepo vreteno i kontrole, lijep kruti stroj.Vrlo lijep električarski posao, dobro izgleda.
Mjenjač alata također dobro radi.
Kupio sam 3 stroja od vas.Rade dobro, želim kupiti više opreme od vaše tvrtke.
Ispitivanje stroja
1. Detekcija točnosti pozicioniranja linearnog gibanja trebala bi se provoditi u uvjetima praznog hoda, a lasersko mjerenje će prevladati.
2. Repetitivno otkrivanje točnosti pozicioniranja linearnog gibanja, instrument koji se koristi za otkrivanje je isti kao onaj koji se koristi za otkrivanje točnosti pozicioniranja.
3. Detekcija povratne točnosti izvora linearnog gibanja.
4. Obrnuto otkrivanje pogreške linearnog gibanja mjeri se više puta (općenito 7 puta) na tri položaja blizu sredine i na oba kraja hoda, izračunava se prosječna vrijednost svakog položaja, a najveća vrijednost dobivene prosječne vrijednosti je inverzna vrijednost pogreške.

Kategorije proizvoda
-

BC6085 Alatni stroj za oblikovanje po tvorničkoj cijeni s ...
-

TCK25 mali automatski visokokvalitetni tip sl...
-

C6140/C6240 metalni središnji tokarski stroj s otvorom
-

VMC650 Vertikalna metalna CNC glodalica s 3 osi velike brzine...
-

H50 tokarenje metala cnc kombinirani tokarski stroj za glodanje...
-

BC6050 visokokvalitetni stroj za oblikovanje metala





